<
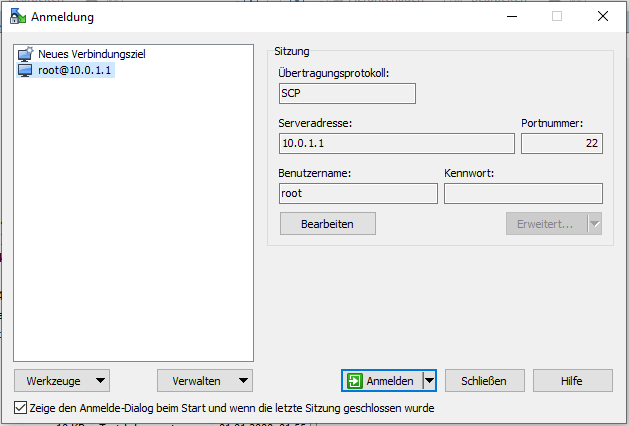
<Nachdem das Prinzip, welches ich eigentlich verwenden wollte, nicht geklappt hat, habe ich mich dazu entschieden Messungen mit dem EV3 Roboter zu machen, um einen besseren Weg zu finden den Roboter zu stabilisieren. Der EV3 Roboter bietet die Möglichkeit über die USB-Verbindung und das SCP Protokoll (Secure Copy), eine verschlüsselte Übertragung von Daten zwischen meinem Computer und dem Roboter herzustellen. Ein Programm für den Computer, welches über das SCP Protokoll kommunizieren kann und eine einfache Bedienung hat, ist WinSCP. Wenn man WinSCP nun startet, muss man die IP-Adresse des Roboters eingeben, welche in meinem Fall 10.0.1.1 war, SCP als Übertragungsprotokoll auswählen, den Benutzernamen root setzten und das Passwort frei lassen.
und das SCP Protokoll (Secure Copy), eine verschlüsselte Übertragung von Daten zwischen meinem Computer und dem Roboter herzustellen. Ein Programm für den Computer, welches über das SCP Protokoll kommunizieren kann und eine einfache Bedienung hat, ist WinSCP. Wenn man WinSCP nun startet, muss man die IP-Adresse des Roboters eingeben, welche in meinem Fall 10.0.1.1 war, SCP als Übertragungsprotokoll auswählen, den Benutzernamen root setzten und das Passwort frei lassen.
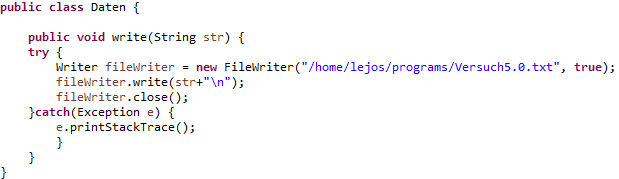
Der Benutzername root ermöglicht nachher die volle Berechtigung, Daten zu schreiben, zu lesen und weiteres. Nach der Verbindung zum Roboter kann man sich Dateien angucken oder auf seinen Computer kopieren. Ich habe mir dafür ein kleines Programm geschrieben, welches die Sensordaten in eine Textdatei schreibt. Die Textdatei kann ich dann einfach in Geogebra einfügen, um meine Daten auszuwerten.
Mein erste Messung galt der Zeit, die der Gyro-/Lagesensor braucht, um die Winkelgeschwindigkeit und den Winkel auszugeben. Als Ergebnis kam heraus, dass der Sensor 0-1ms(Millisekunde/n) braucht. Danach habe ich mir den Winkel und die Winkelgeschwindigkeit von einem Fall ausgegeben. Mein Endresultat war ein Graph, der auf der X-Achse den Winkel abgebildet hatte und auf der Y-Achse die Winkelgeschwindigkeit.(ungefähr nimmt die Winkelgeschwindigkeit pro Winkel um 6.4 zu/ab).
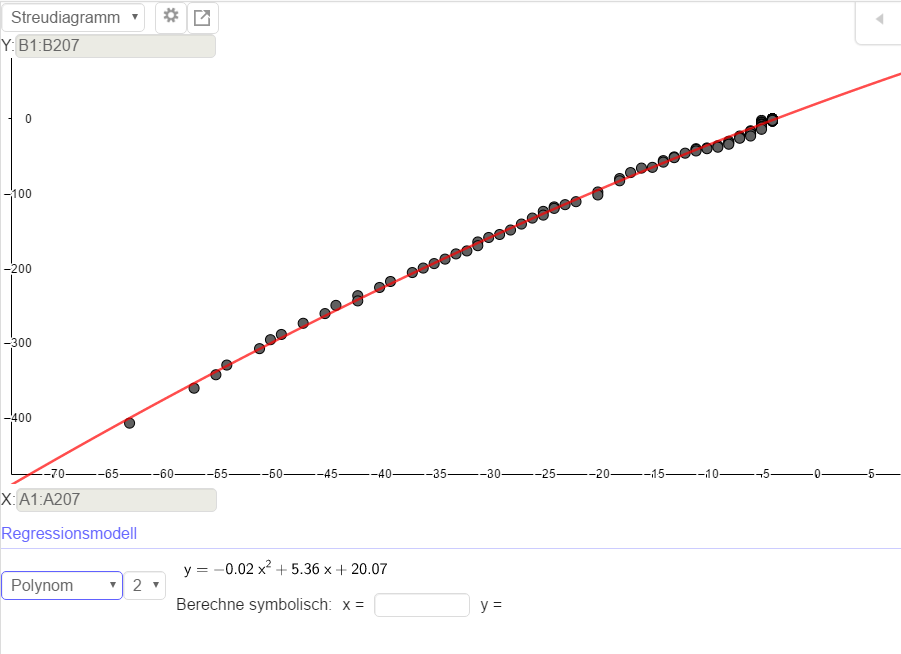
Dieser Graph zeigt den Fall des Roboters nach vorne. Wegen den Daten ist der Graph jedoch um vier X-Einheiten nach links verschoben, da der X-Winkel 0° in dem Graphen -4° ist.
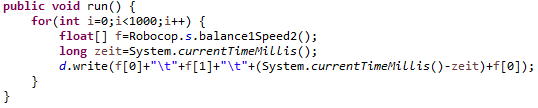
Außerdem habe ich mir Daten bezüglich des Winkels in Abhängigkeit von der Zeit beschafft durch die folgende Methode, die parallel in einem Thread neben dem Main-Thread lief: