 <
<So, die Idee stand. Ich wollte ähnlich wie das was ich gesehen hatte, einen Roboter bauen, der ein Mosaik legen kann. Das Einscannen eines Bildes wollte ich weglassen, stattdessen sollte er immer zu einem bestimmten Ort fahren, wo er einen Stein nimmt und ihn dann an der Stelle 1 platziert. Dann sollte er zurück fahren, den nächsten Stein hohlen und an der Position 2 ablegen usw.
Nun ging es an die Planung und schnell war klar, ich würde für die Umsetzung mindestens einen weiteren der stärkeren Motoren benötigen. Ich habe mich dazu entschieden das Projekt in Partnerarbeit anzugehen. Wir teilten uns die Aufgaben auf: Mein Partner würde den Roboter bauen, da er die benötigten Teile zuhause hat und ich sollte den programmier-Part übernehmen. Bevor wir aber damit begonnen, habe ich noch ein paar sehr grobe Skizzen entworfen damit mein Partner weiß wie er den Roboter bauen muss und damit ich weiß wie er später aussieht. Dadurch konnte ich mit dem Programmieren beginnen bevor der Roboter fertig war, da ich wusste wo sich später welcher Motor befinden sollte und wie sich dieser dann bewegen müsste.
In der folgenden Woche hab ich also überlegt welche Funktionen und Klassen ich bräuchte um zuerst nur eine Reihe zu legen. Das sah wie folgt aus:
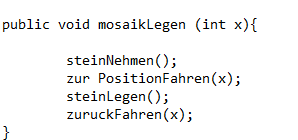
Ich habe hier bereits die Variable „x“ eingebaut, die später dazu dienen sollte, dass der Roboter weiß wie viele Steine er in eine Reihe legen soll.
Als das erledigt war, hab ich die einzelne Klassen geschrieben. Als auch das erledigt war, hab ich versucht den Quelltext so umzuschreiben, dass es auch zweidimensional funktionieren sollte. Leider konnte ich sowohl den bisherigen als auch den darauf folgenden Code nicht richtig in der Praxis testen. Ich habe zwar feststellen können, das die Motoren richtig angesprochen werden, jedoch musste ich dafür einzelne Motoren nutzen, da der sich Roboter noch im Bau bei meinem Kollegen zuhause befand.