 <
<
Hallo Liebe Leser, ich heiße Jean-Michél und habe den mechanischen Anteil von „Horst oder Klaus“ in Partnerschaft mit meinem Partner Tobey übernommen.
Normalerweise wird erstmal beschrieben inwiefern man mgl. mit anderen Sachen experimentiert hat, wie z.B. den Cozmo Robotern oder Mindstorms Pre-Builts. Aber in unserem Kurs war vor allem die Charakteristik vorhanden, dass wir an der Ideenfindung festhingen. Ich und mein Partner Tobey hatten schon vorher im Rahmen des Informatik-Unterrichts mit den Cozmos herumgespielt, und waren deshalb einfach fokussiert auf die Ideenfindung.
der Werdegang unseres Roboters in diesem Schuljahr war ein episches Drama aus Tränen, Verrat, Freude, Lachen, Wut, Verzweiflung, noch mehr Tränen und viel Nicken meinerseits während ich so tat als würde ich die Erklärungen von meinem Partner Tobey über Informatik Zeug wie z.B. Binärbäume o.ä. auf Anhieb zu verstehen. Die Ideenfindung war sehr schwer, und auch sehr nervig (jedenfalls für mich persönlich). Es fing alles mit Schach an… Wir dachten uns, dass es schon ziemlich geil wäre einen Roboter zu haben der gegen einen selbstständig Schach spielt, aber uns ist aufgefallen, dass wir dafür nicht wirklich genug Bausteine haben, sonst hätten wir es gemacht. Ehrlich.
Das heißt der Schachroboter ist vom Tisch, was nun? Wie wär’s mit Tic-Tac-Toe? Fand ich aber nicht so toll, vor allem da es dann schon jemand anderes angefangen hatte, welcher den selben Gedankengang wie wir beide hatte.
anders als die anderen Leute in unserem Robotik Kurs haben wir, also ich und mein Team-Partner Tobey, uns freiwillig (also ohne Waffe(l) am Kopf vom Mathe-Liebhaber Eschweiler) dazu entschlossen einen Roboter zu bauen der Funktionsgraphen per Input zeichnet.
Entry: Unser Roboter, welcher per Homage an unseren fantastischen Mathe liebenden Robotik Lehrer, Herr Eschweiler, liebevoll mit „Horst oder Klaus?“ benannt wurde.
Horst oder Klaus? ist sozusagen das physikalisierte „Graph“ Menü unseres Taschenrechners, in welchem wir eine mathematische Funktion eingeben können woraufhin diese vom Taschenrechner digital gezeichnet wird. Also dachten wir uns, dass es eine schöne Herausforderung wäre, genau diesen Prozess auch physikalisch darzustellen.
Wir mussten uns natürlich erstmal viele Gedanken machen wie wir so etwas überhaupt mechanisch und auch informatisch realisieren können, wir hatten ja sowas noch nie gemacht. Vor allem die Kombination aus beidem hat uns relativ schwere Probleme bereitet, da schon jeder Informatik-Laie weiß, wie bockig Informatik an sich sein kann. Und sobald man halt auch den genannten mechanischen Teil versucht einzubauen wird es richtig wyld.
Jetzt geht es aber ans eingemachte, unser Roboter ist 3-Achsig, also ganz klassisch gibt es eine X, Y und Z Achse. Hierbei stehen die jeweiligen Achsen für die vektoriellen Richtungen also;
X: Hauptschlitten links-rechts
Y: Stiftschlitten hoch-runter
Z: Stiftschlitten höher-tiefer
Wie man sehen kann, mussten wir unseren Roboter ganz klassisch in 2 „Schlitten“ unterteilen. Hierbei war uns persönlich aber wichtig zu versuchen, so kompakt und komprimiert wie möglich zu bauen, da wir uns einig waren, dass dies noch eine gewisse Herausforderung darstellt. Gleichzeitig mussten wir auch ein Gestell fabrizieren auf welchem die Schlitten hin und her fahren können, das war tatsächlich noch am einfachsten für mich zu realisieren.


Ich habe mich dazu entschieden anstelle von Reifen o.ä. Zahnräder zu verwenden da ich fand, dass man diese mit deutlich mehr Präzision vom geschriebenen Programmen ansteuern lassen kann. Das Augenmerk bei dem Gestell lag, neben der möglichst kleinen Größe, vor allem aber auch auf der Stabilität. Ich wollte ein „unkaputtbares“ Gestell haben. Des weiteren mag ich persönlich Modularität. D.h. es war mir wichtig in wenigen Handgriffen in der Theorie sogar das gesamte Gestell umbauen zu können, diese Möglichkeit erkennt man vor allem an den wenigen Verbindungspunkten an den Seiten, für die beiden Schienen sind dies 9. Die Plattform ist nicht wirklich erwähnenswert, also wirklich. Das ist tatsächlich einfach ein Quadrat aus 2 Platten die wir in einer Kiste gefunden haben welche wir unten herum mit Steinen sehr fest miteinander verbunden haben. Eine weitere Stärke des Bunds kommt vor allem von den Seitenteilen welche wir wie man sehen kann in die Struktur des Quadrats integriert und auch nochmal unten herum befestigt haben. Alles in allem ist das Gestell sehr stabil. Es war uns auch sehr wichtig wenigstens das Gestell symmetrisch zu bauen und zu stabilisieren, dies ist bei den Farben teilweise gescheitert, aber ansonsten auch ziemlich gut gelungen, denn wie jeder weiß ist die Symmetrie des Grundgerüsts eines Baus der Grundstein für ordentliche Arbeit (Zitat von mir selbst, in Minecraft oder so, Datum unbekannt) (Ich baue eigentlich sehr gerne chaotisch).
Jetzt fragt ihr Leser euch natürlich: „Aber Jean, da gibt es ja gar keine Horizontal-Streben zwischen den Schlitten-Schienen, die Wackeln doch bestimmt, oder?“
Antwort: Ja, sie fehlen, und sie würden die von mir so stark gewünschte Stabilität nochmal deutlich erhöhen. Bitte vermeidet sinnvolle Fragen zu stellen, sonst werde ich rot und schaue auf den Boden. Spaß beiseite, die Horizontal-Streben gab es mal, aber irgendwie sind die verloren gegangen und… Ja. Hier habt ihr nochmal eine Draufsicht falls euch langweilig ist:

Weiter geht’s, ich bin unter Zeitdruck.
Denn jetzt kommt der spannende Teil, den ich sehr schlecht dokumentiert habe, der Schlitten. Eigentlich wollten wir erstmal nur 2 Achsen auf dem Schlitten verbauen, welchen ich jetzt mal aus Einfachheit… Günther nenne. Aber die Problematik bestand darin, dass ich nicht fortgeschritten genug bauen konnte um bspw. eine Hebebühne unter die Plattform zu bauen welche den Stift in Kontakt mit der Oberfläche, die ihr oben in rot seht, bringen würde. Um ein bisschen die Schuld von mir wegzuschieben, der Motor wäre eh dazu zu schwach gewesen. Ich hatte mal die wilde Idee irgendein Gerüst aus Kolben zu benutzen, aber das ist.. Schief gegangen :).
Jetzt kommt das eigentliche Meisterwerk auf das ich sehr stolz bin;

Das ist Günther. Günther ist sehr kompakt und mag seinen Namen nicht. Ich bin trotzdem sehr stolz auf ihn. Er ist etwas unübersichtlich gebaut, aber da kann man sich schnell hereinfuchsen. Ihr seht an der Unterseite des Bildes 2 Zahnräder welche auf der anderen Seite, von der ich definitiv Bilder habe, auch auffindbar sind.
In Günther befinden sich:
- 3 Motoren welche bestimmt einen besonderen Namen haben, bei uns im Kurs aber „kleine Motoren“ heißen
- Ungefähr 8 Zahnräder
- 5-6 „Achsen“, das sind diese kleinen 4-Kant Stangen die ihr hier 2x auf der linken oberen Seite von Günther sehen könnt, die sind nötig um Zahnräder mit einem Motor zu verbinden
- Ein paar andere
unwichtigeSteine - Ein Stift an welchen ich liebevoll mit Sekundenkleber einen verhältnismäßig unverschämt teuren „Schienenstein“ geklebt habe (Herr Eschweiler hat sich im Hinterzimmer versteckt als ich den Sekundenkleber herausgeholt hab)
Ich bin echt gut im Listen machen.
Günther vereint alle 3 vektoriellen Achsen miteinander, welche ich relativ weit oben im Post erwähnt habe. Ich hoffe echt es gibt hier kein Wortlimit.
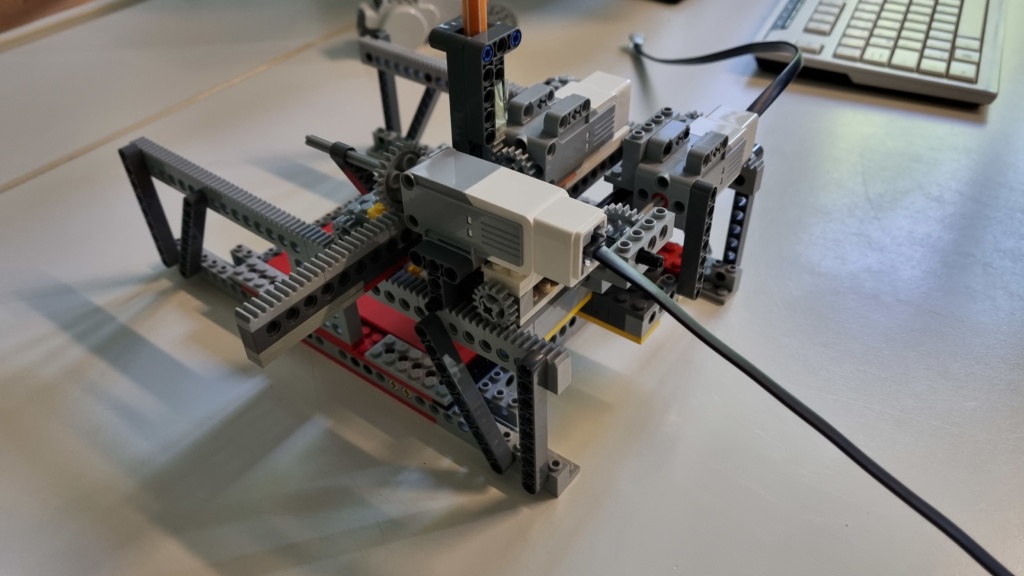
Hier habt ihr nochmal 2 Bilder aus anderen Perspektiven um besser zu verstehen, und zu erkennen inwiefern der Schlitten die 3 Achsen manipuliert;

Bei diesem Bild liegt der Schwerpunkt auf der Y-Achse welche sozusagen die Breite der Fläche entlangfährt.

Hier wiederum, sieht man mgl. etwas schwerer unseren Stift-Hoch-Und-Runter-Fahrinator 9000, welcher den Stift hoch und runter fährt.
Die Steine und Achsen mögen etwas gebogen und gekrümmt sein, falls ihr das nicht ertragt, schaltet hier lieber ab (bitte nicht).
Es war wirklich, wirklich extrem schwer Günther ins Leben zu bringen, hier kommt vor allem der Tränen und Wut part meiner am Anfang geschriebenen Einleitung ins Spiel, denn wenn man kompakt und stabil bauen will, wird es schwer. Vor allem mit limitierten Mitteln. Aber es hat geklappt, man könnte Günther auch als „Dr. Jean’s Monster“ titulieren.

So sitzt Günther auf Horst und Klaus, sieht doch ziemlich schön aus, oder? Mir kommen jedenfalls die Tränen… (Freudentränen)
Hier erkennt man auch nochmal deutlich inwiefern Zahnräder die bessere Wahl im Bezug auf den Fortbewegungsmechanismus sind, die einzige Alternative die mir in den Sinn kamen wären Reifen gewesen. Reifen sind doof. Und sie hätten den Wunsch nach komprimiertheit deutlich erschwert, ein Reifen ist ungefähr doppelt bis dreimal so breit wie ein Zahnrad. Ich würde es euch per Bild zeigen, habe aber jetzt kein direktes Vergleichsbild.. Aber ein sehr kurzes Video inwiefern die jeweiligen Achsen arbeiten habe ich (es ist ein bisschen älter, Unterschiede von Günther nehme ich mir vorweg ;))
Warnung: Hintergrundgeräusche des Kurses 🙂
Man sieht hier wie die jeweiligen Achsen bewegt werden, die X-Achse bewegt sich indem Günther auf dem Gestell hin und her fährt. Die Y-Achse ist das längere Stück welches rein und raus fährt. Und die Z-Achse, also die Höhe des Stifts sieht man anhand des Zahnrads welches den Schienenstein am Stift entlanggeht.
Ich würde euch stärkstens empfehlen bei meinem Projektpartner, Tobey, vorbeizuschauen. Aber nicht bei ihm zuhause, sondern bei seinem Blog, welchen ihr unter der selben Kategorie auf der Website wie meiner finden könnt ;). Er war das Informatik-Brain hinter dieser Geschichte und hat einige ziemlich interessante Sachen in Bezug auf informatische Konzepte wie in etwa Binärbäume, welche wir benutzt haben um Funktionen in Arbeitsschritte aufzuteilen, also für den Roboter in Achsenbewegungen zu übersetzen, benutzt. Dort werdet ihr wahrscheinlich, schockierend, auch erfahren, dass wir beispielsweise, anstelle von Java, also der Sprache mit welcher man normalerweise die EV3 Mindstorms Roboter programmiert, MicroPython benutzt haben. MicroPython ist eine abgespecktere Version von Python, da wir den Prozessoren der Mindstorms Roboter das normale Python, mit all seinen „Libraries“, nicht so eine Last zumuten können.
Ich hoffe euch hat mein kleiner lustiger Blog-Eintrag zu meinen Erfahrungen des Robotik Kurses gefallen, ich persönlich muss sagen, dass es eine wirklich fantastische Zeit war, und kann jedem empfehlen diesen in der Q1 zu wählen, sollte eine Wahlmöglichkeit bestehen. Es ist wirklich eine interessante Erfahrung mal ohne Lehrplan und Handführung der Lehrer zu arbeiten. Die Atmosphäre ist eine vollkommen andere und extrem entspannt. Ich muss tatsächlich sagen, dass ich auf diese Art- und Weise auch mal von meinem normalen Schul-Alltag loskam und die Monotonie brechen konnte. Kleiner Tipp an alle nachläufigen Schüler des Robotik Kurses: schreibt konstantere Blog-Einträge und nicht so wie ich nur einen. Fühlt sich jetzt mehr wie ein einzelner Bericht als ein Blog an, hat mir aber trotzdem relativ viel Spaß gemacht den zu schreiben.
In dem Sinne und bis dahin,
Jean-Michél