In diesem Abschnitt des Blogs werde ich im Laufe des Projekts immer wieder kleinere Änderungen oder Erweiterungen einfügen und kurz erklären, weshalb diese nötig waren. Solltet ihr überlegen den Robotik Kurs zu wählen, kann ich euch das zwar wärmstens empfehlen, allerdings solltet ihr euch auf Veränderungen im Verlauf des Projekts einstellen. Ein Projekt ohne Veränderungen gibt es nicht!
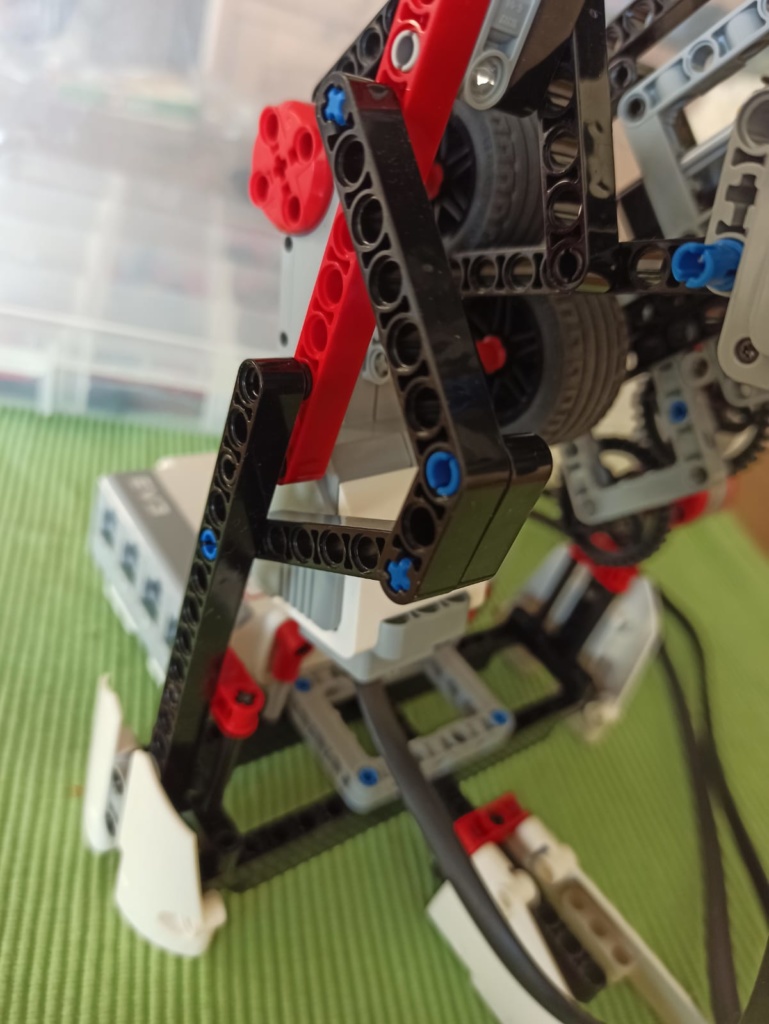
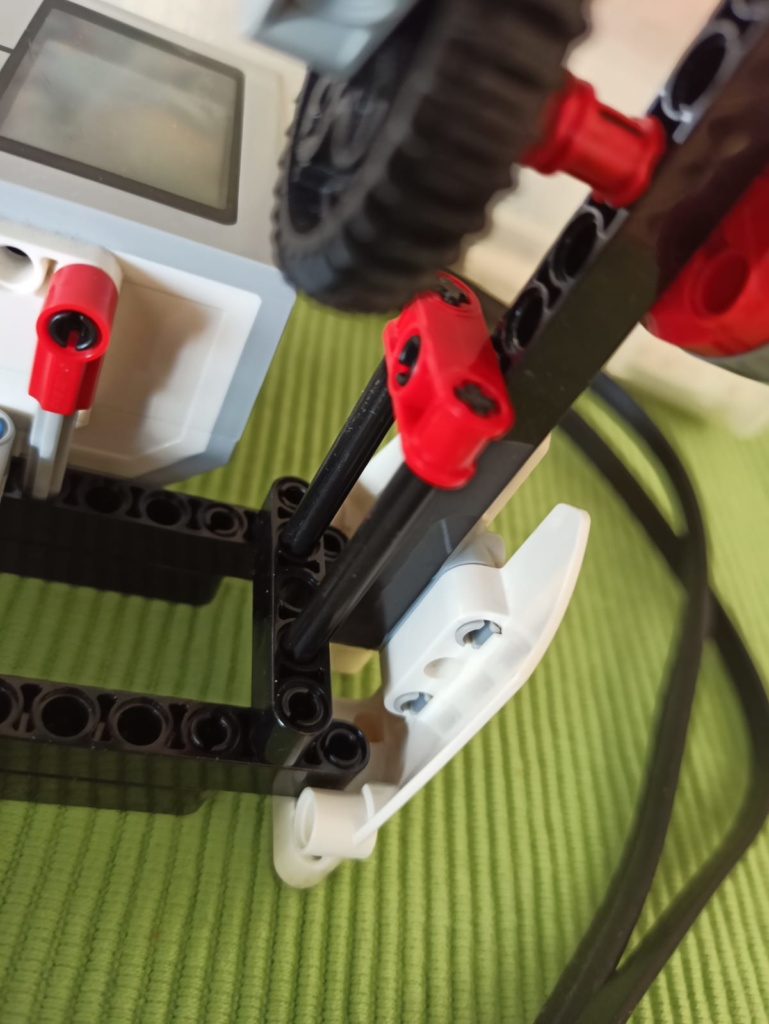
Stabilität
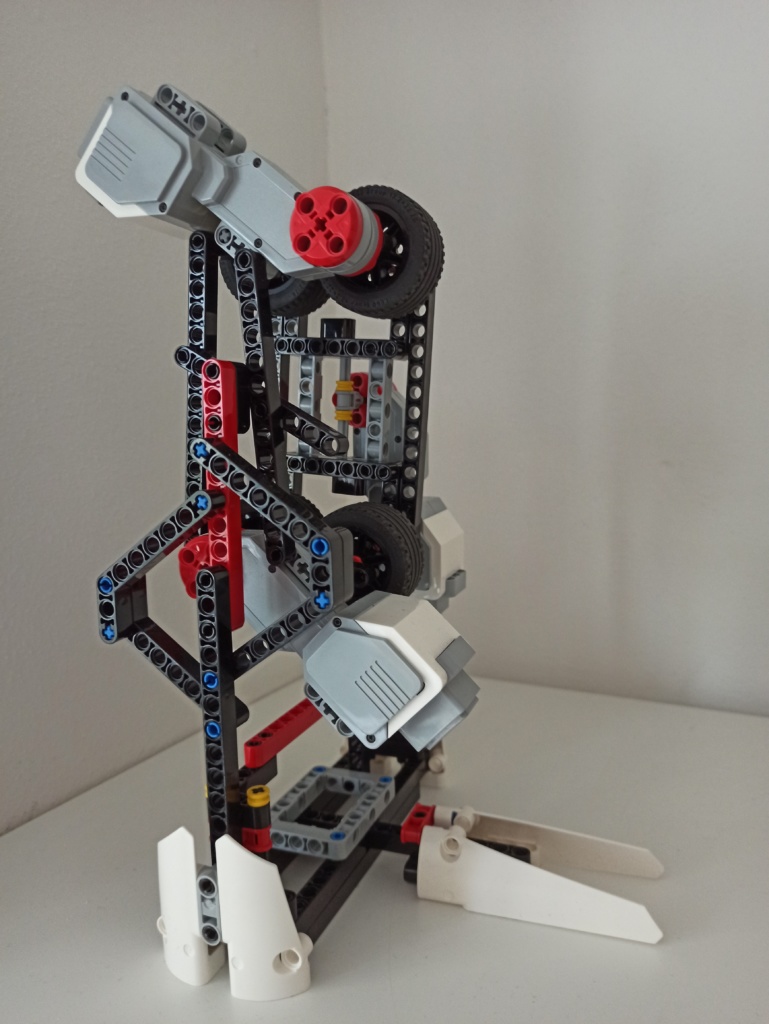
Da die Stabilität immer noch ein Problem dargestellt hat, habe ich zwei kleine Bausteine gebaut (siehe Bilder) die die Konstruktion ergänzen und sich positiv auf die Stabilität der Halterung auswirken. Angebracht habe ich sie jeweils an den „Säulen“, dementsprechend wurde jeder Baustein also zwei Mal verbaut.
Das Gleichgewichtsproblem
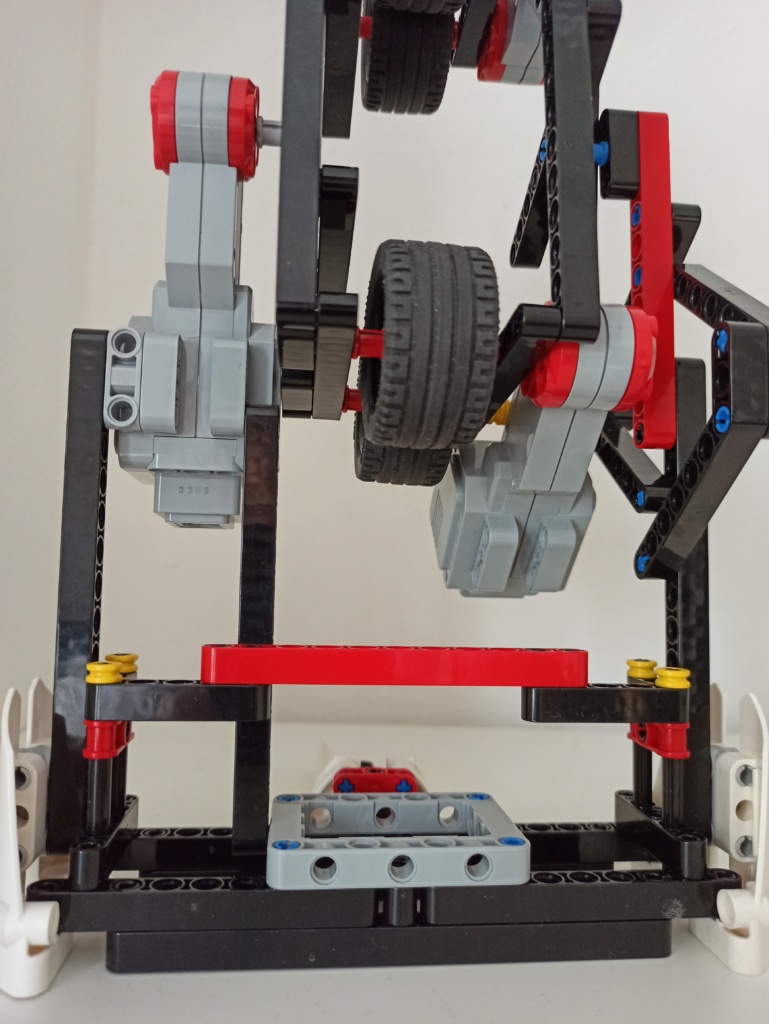
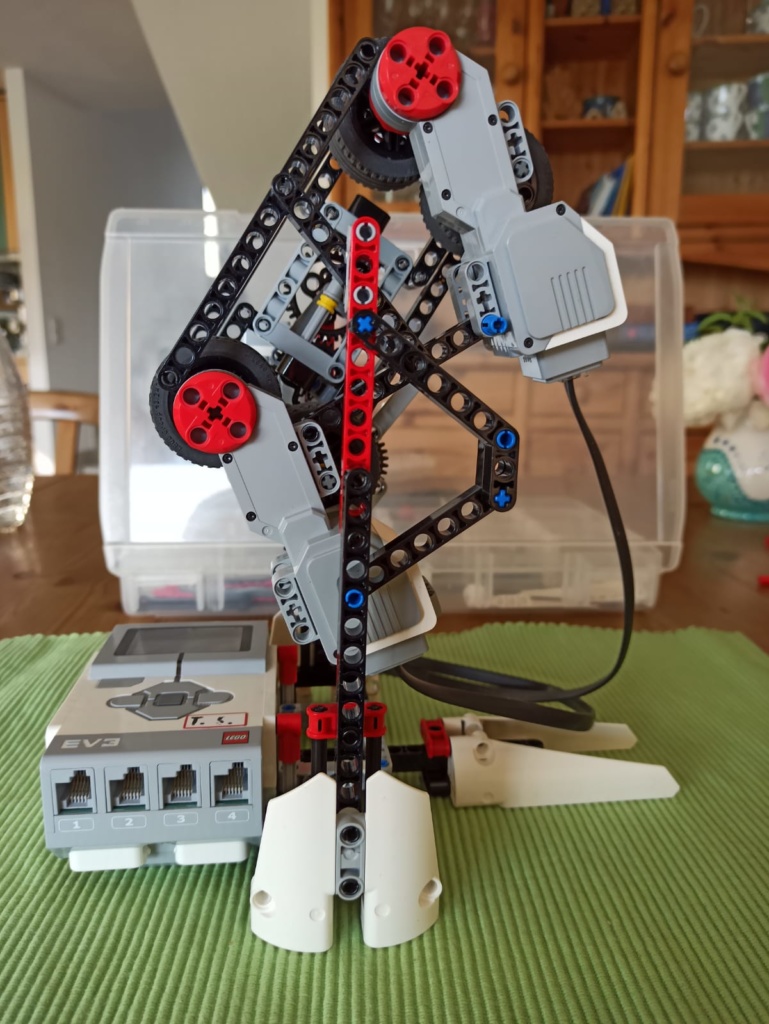
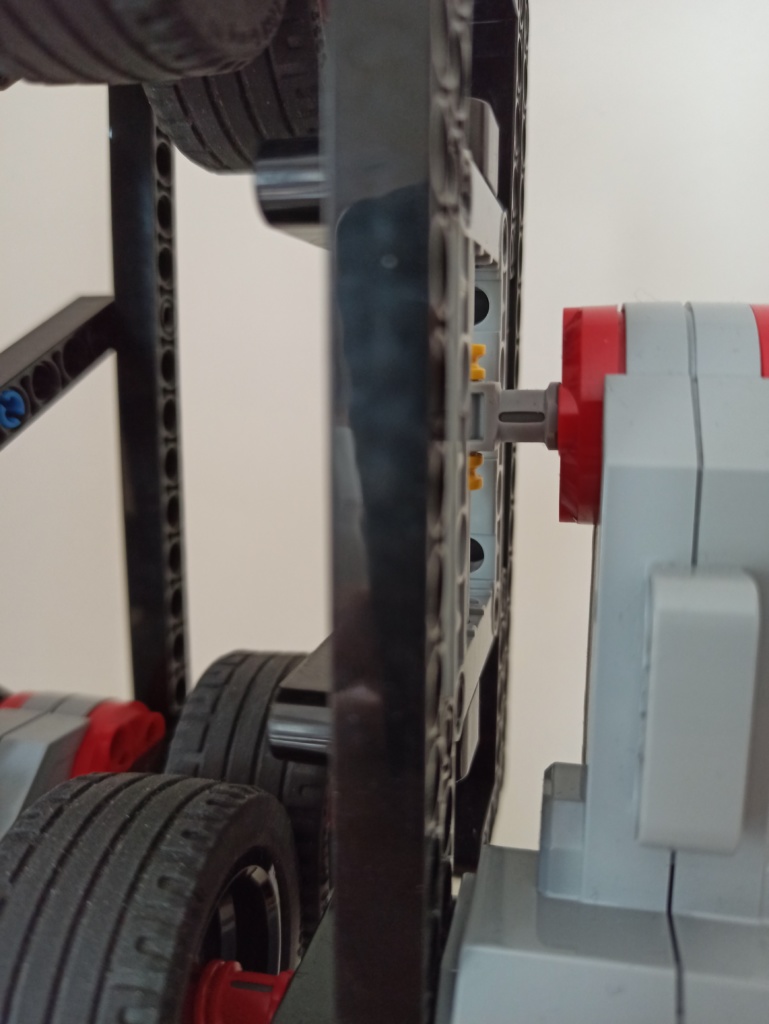
Während der ersten Testläufe der vollständigen Anlage, ist folgendes Problem aufgetreten: Die Spannvorrichtung ist auf der einen Seite deutlich schwerer als auf der anderen und sinkt somit immer wieder in eine Schieflage zurück. Dieses Problem wird darüber hinaus auch noch durch das Spiel der Zahnräder verstärkt. Um diesen Knackpunkt nun zu lösen waren entscheidende Veränderungen am Aufbau nötig. Im ersten Schritt habe ich die Zahnräder entfernt und den Motor direkt an der Achse befestigt. Schritt zwei war dann die Drehung eines Motors der Spannvorrichtung, um ein gleichgewicht-symmetrisches Konstrukt zu erhalten. Beide Schritte waren erfolgreich und haben am Ende auch den gewünschten Effekt erzielt.
Stabilität 2
Da durch die Veränderungen zum Ausgleich der Balance der Anlage die Stabilität wieder einige Mängel aufweist, habe ich einen Querbalken zwischen der rechten und linken Säule eingefügt. Dieser hat die nötige Stabilität wiederhergestellt.